
OxTS Georeferencer는 LiDAR 스캐너(OxTS 관성 내비게이션 시스템과 실시간으로 동기화됨)로 수집된 파일, OxTS INS에서 처리된 내비게이션 궤적 파일 및 일부 필수 구성 파일을 가져와 많은 타사 LiDAR 소프트웨어 패키지에서 볼 수 있는 LAS 포인트 클라우드 파일을 생성 합니다.
또한 Boresight 기술에 대한 경험 덕분에 시스템 통합업체와 최종 사용자가 INS 및 LiDAR 하드웨어가 정확하고 정확하게 설치되었다는 확신을 가지고 작업을 시작할 수 있도록 도와주는 데이터 기반 기술을 개발할 수 있었습니다.
OxTS Georeferencer 프로세스 흐름
OxTS Georeferencer의 주요 기능은 OxTS INS 및 LiDAR 데이터 세트를 동기화하고 융합하는 것입니다.
LiDAR 센서는 대상까지의 거리를 감지할 수 있지만 대상이 언제, 어디에 있는지, 마지막 스캔 이후 어디로 이동했는지에 대한 내부 지식은 없습니다. INS가 필수 정보를 추가하는 곳은 다음과 같습니다.
•나노초 정확한 시간(측량 등급 GNSS 수신기)
•RTK/PPK 정확한 위치(측량 등급 GNSS 수신기 및 긴밀하게 결합된 내비게이션 엔진)
•정확한 방향, 피치 및 롤(측량 등급 IMU 센서)
실시간 정확도도 보고 되므로 INS의 추정 위치/방향 정확도를 기반으로 데이터를 지능적으로 필터링 할 수 있으므로 후처리에서 데이터 정리 작업을 덜 수행할 수 있습니다.
OxTS Georeferencer ‘방법’ 튜토리얼
이 짧은 튜토리얼 비디오를 통해 OxTS Georeferencer 사용의 기본 사항을 알아보고 다음에 대해 자세히 알아보세요.
•OxTS Georeferencer 및 호환 LiDAR 센서에 필요한 다양한 파일을 사용하는 방법
•측량 경로와 OxTS Georeferencer가 제공하는 다양한 처리 옵션을 확인하는 방법
•Georeferencer, Point Cloud 생성 기능
또한 이 튜토리얼에는 OxTS Georeferencer 내에서 사용할 수 있는 Boresight 보정 도구 에 대한 소개가 포함되어 있으며 Point Cloud 사용 예시를 보여줍니다.
| Time Overlap Chart: | ||
| OxTS Georeferencer 내의 시간 중복 차트는 측량자에게 지도에서 측량 경로를 시각화 하고 측량의 시작 및 종료 시간을 선택할 수 있는 기능을 제공합니다. | ||
| 이 기능은 설문조사의 어느 부분을 보거나 발표할지 결정할 때 유연성을 더해 줍니다. | ||
| Global Coordinates: | ||
| 다음을 포함한 다양한 좌표계 의 데이터를 처리합니다 .
•지역 좌표 | ||
| 3D Hardware setup viewer : | ||
| LiDAR 측량자가 OxTS INS 및 LiDAR 센서의 올바른 상대 회전 각도를 입력하는 데 도움을 주기 위해 OxTS Georeferencer에는 3D 하드웨어 설정 뷰어가 포함되어 있습니다. | ||
| 사용자가 선택한 센서에 따라 보이는 LiDAR 모델이 달라집니다. 이 기능을 사용하면 빠르고 직관적인 측량 구성이 가능합니다 . | ||
| Processing Options : | ||
| 다양한 처리 옵션을 통해 포인트클라우드의 유용성을 극대화하고 데이터 크기를 최소화합니다 .
•지정된 정확도 내에서 모든 Point를 유지하면서 불확실성을 기준으로 Point를 필터링합니다. |
두 장치의 좌표계가 완벽하게 일치하지 않으면 LiDAR 데이터의 Georeferencer가 더 긴 범위에 걸쳐 분산되어 포인트 클라우드의 정확도가 떨어 집니다.
OxTS Georeferencer 에는 사용자가 항상 깨끗하고 신뢰할 수 있는 데이터를 생성할 수 있도록 LiDAR 장치를 지원하는 조준 기능이 포함되어 있습니다.
조준 교정 실행 결과는 때로는 매우 명확하고 때로는 미미하지만 목표는 동일합니다. 즉, 사전 정의된 테스트 시나리오에 관계없이 높은 수준의 정확도를 보장하기 위해 차량의 모든 센서를 동일한 좌표계에 정렬하는 것입니다.
조준 시스템은 측량 수행 방식에 있어 완전한 유연성을 제공합니다.
Boresight 슬라이드 비교
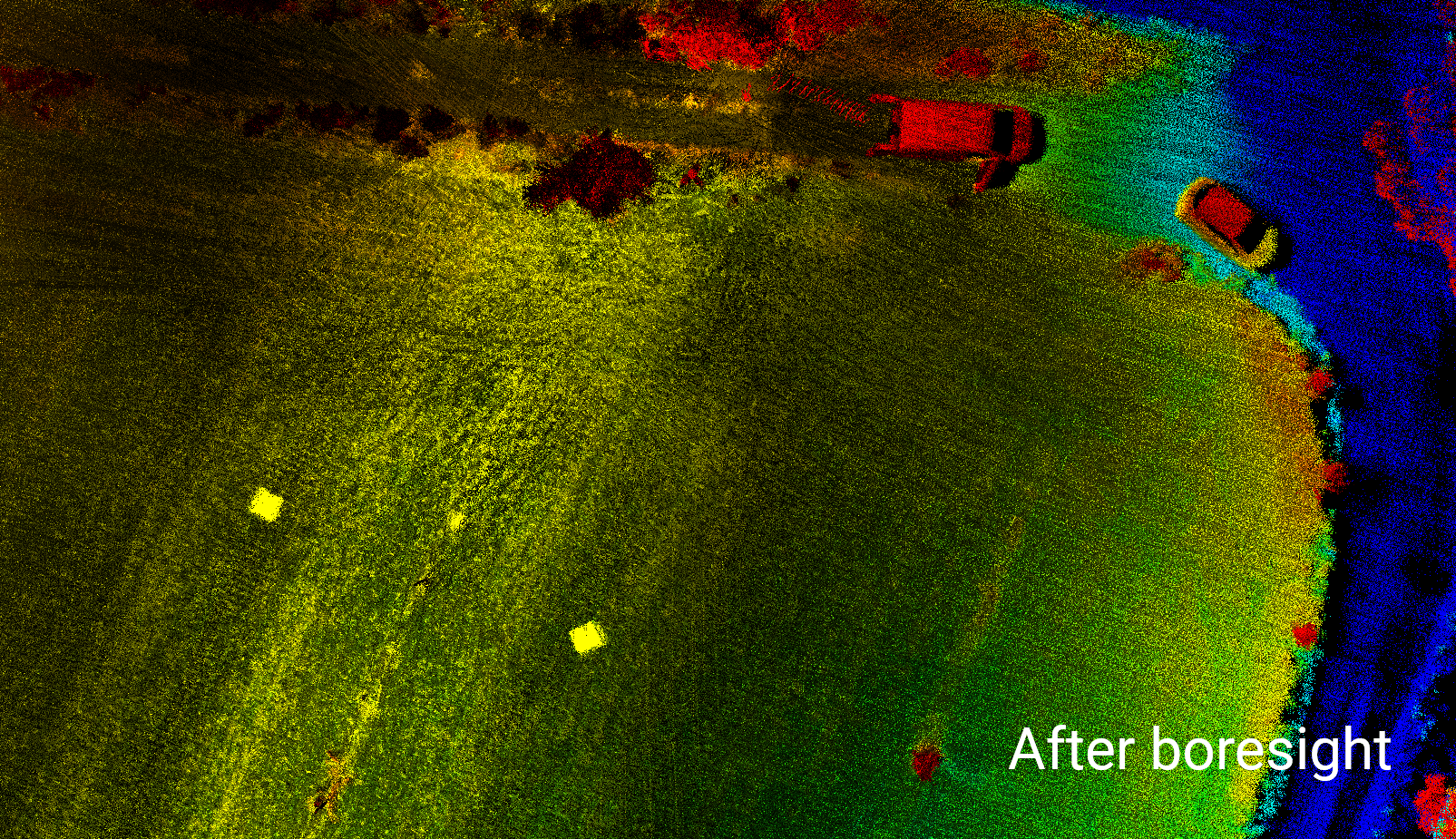
비교1 – 전체 환경 Point Cloud
아래의 ‘전체 환경’ Point Cloud는 Boresight를 사용한 Point Cloud와 사용하지 않은 Point Cloud 간의 차이를 명확하게 보여줍니다. ‘이전’ 예에서 흐릿하고 두개로 보이는 반면 Borsight ‘이후’ 예는 훨씬 더 명확하게 물체가 보입니다.
Befer Boresight
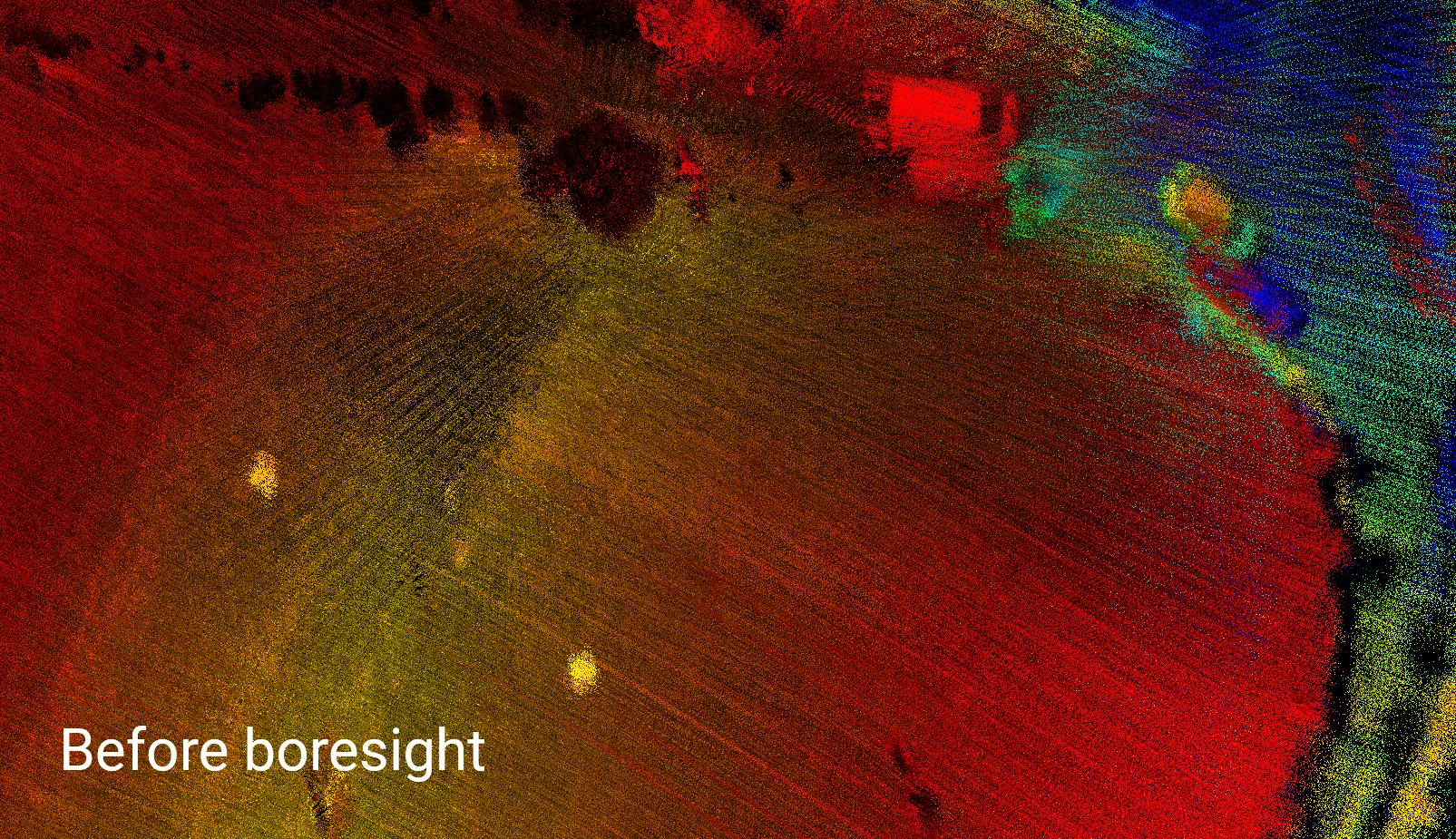
After Boresight
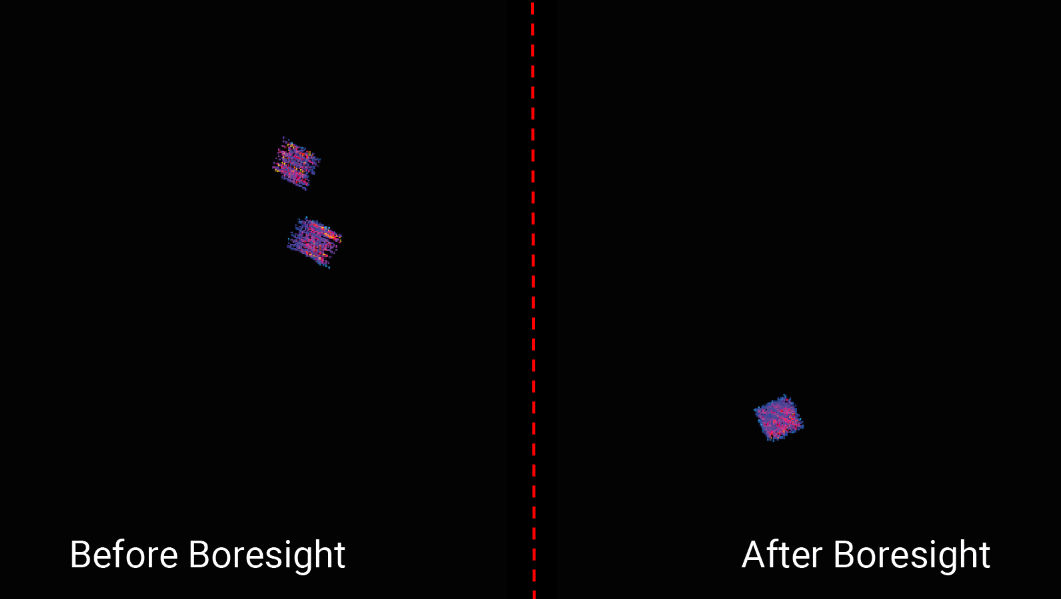
비교2 – Target
아래의 전후 예는 조준된 포인트 클라우드와 조준되지 않은 포인트 클라우드 간의 차이를 명확하게 보여줍니다.
아래 예는 두 개의 80cm x 80cm 정사각형 타겟을 보여줍니다. ‘조준 전’ 예에서는 대상이 복시로 인해 4개로 나타나는 것을 명확하게 볼 수 있습니다. 그러나 데이터 기반 기술을 사용하여 INS와 LiDAR 센서 사이의 각도가 보정 되면 이중 시야가 완전히 제거되고 두 대상이 명확하게 보이고 훨씬 더 선명해집니다.
비교3 – 도로 측량
아래 사진은 도로 측량 중 촬영한 거리의 단면입니다. ‘boresight 전’ 예에서는 거리의 동쪽과 서쪽 통행로 사이에서 측정된 각도에 대상이 불명확하게 보입니다. 그러나 ‘boresight 후’ 예에서는 동쪽과 서쪽 통행로에서 훨씬 더 명확하고 정확한 포인트 클라우드를 얻을 수 있습니다 .
Befer Boresight
After Boresight
| 제조업체 | LIDAR 모델 | 소프트웨어 버전(이상) | 상태 |
|---|---|---|---|
| Velodyne | VLP-16 Puck / Puck Lite | 1.0 (or later | Tested |
| Velodyne | VLP-32C / VLP-32MR | 1.2 (or later) | Beta |
| Velodyne | Alpha Prime VLS128 | 1.2 (or later) | Beta |
| Velodyne | HDL-32 | 1.5 (or later) | Beta |
| Hesai | Pandar40 | 1.4 (or later) | Beta |
| Hesai | Pandar40P | 1.2 (or later) | Tested |
| Hesai | Pandar 40M | 1.4 (or later) | Beta |
| Hesai | Pandar64 | 1.4 (or later) | Beta |
| Hesai | PandarQT | 1.4 (or later) | Beta |
| Hesai | Pandar128 | 1.4 (or later) | Beta |
| Hesai | PandarXT-16 | 1.4 (or later) | Beta |
| Hesai | PandarXT-32 | 1.4 (or later) | Tested |
| Ouster | All Gen2 (32, 64 & 128 versions of OS0, OS1 & OS2 sensors) | 1.2 (or later) | Beta |
| Ouster | OS1-64 | 1.2 (or later) | Tested |
| Livox | Avia | 1.5 (or later)/td> | Tested |
| Livox | Mid-40 | 1.5 (or later) | Tested |
| Livox | Mid-70 | 1.5 (or later) | Beta |
